Identity Of Code
هیچی و همه چیIdentity Of Code
هیچی و همه چیدرباره من
 تویتر:twitter.com/Zoqoll
اینستاگرام :www.instagram.com/lambda.xyz
ادامه...
تویتر:twitter.com/Zoqoll
اینستاگرام :www.instagram.com/lambda.xyz
ادامه...
ماتریس دوران (Rotation Matrix)
اگر در یک سیستم قطبی یک بردار داشته باشیم با بزرگی |A| و زاویه تتا برای تبدیل اون به بردار درسیستم مختصاتی دکارت میتونیم از رابطه زیر استفاده کنیم:

ادامه مطلب ...
GJK(Gilbert–Johnson–Keerthi) algorithm
.جی جی کی یکی از معروفترین الگوریتم هایی هست که برای تشخیص برخورد اشکال هندسی محدب به کار میره(دو بعدی و سه بعدی) ، و این بهترین آموزشی بود که ازش پیدا کرد :
http://s5.picofile.com/file/8114232500/The_Gilbert.pdf.html
این تصویر هم به فهم مساله کمک میکنه (برای دیدن تصویر اصلی روی عکس کلیک کنید):

ترجمه جزوه ی دینامیک جسم صلب -RigidBodyDynamic
این جزوه رو از reddit.com پیدا و ترجمه کردم، البته قسمت هایی رو حذف کردم؛و همچنین قسمت هایی رو خودم اضاف کردم.
توجه داشته باشین که تو این جزوه صرفا به دینامیک و حرکت (خطی و زاویه ای) پرداخته شده؛ و در مورد collision ها هیچ بحثی نشده.
آخرش هم نمونه ای از as3 براش گذاشتم به جای نسخه اصلیش که پایتون بود، و همچنین یه قابلیت هایی هم اضاف کردم بهش.
در مورد مدلی که پیاده سازی شده تو جزوه توضیح ندادم؛ مدلمون یک جسم دو بعدی مستطیلی شکل که با درگ کردن شکل نیروی فنر بین مکان نمای موس و نقطه ای از جسم صلب که کلیک شده بوجود میاد و به کل سیستممون وارد میشه، و طبق قانون گشتاور ها ، حرکت زاویه ای هم بر جسممون اعمال میشه و البته هیچ نیروی میرایی به جسم وارد نمیشه، (صرف نظر از نیروی .drag و اصطکاک)(مثال ساده :برگ شناوری روی آب راکد که با انگشت بهش ضربه بزنیم)
لیست فرمول های محاسبه ممان اینرسی شکل های مختلف هندسی :
http://en.wikipedia.org/wiki/List_of_moments_of_inertia
لینک دانلود مقاله:
http://www.4shared.com/office/VFkfujVuce/rigidbodydynamic.html
https://www.dropbox.com/s/pi4r3bts0i5ekqs/rigidbodydynamic.pdf
http://s5.picofile.com/file/8108649334/rigidbodydynamic.pdf.html
نظریه محور مجزا ساز -SAT-Separating Axis Theorem
این متد برای تشخیص برخورد اشکال محدب convex بکار میره، اما برای اشکال مقعر concave هم میشه به کار برد(تقسیم اشکال) کل الگوریتم اینو میگه که : " وقتی دو شکل با هم برخوردی ندارن ، حد اقل یک محور وجود داره که سایه ی شکل روی اونها با هم تداخل ندارن".
در کل اینجوری میتونیم بگیم که "دو جسم با هم برخورد دارن مگر اینکه
خلافش ثابت بشه".
یا اینکه دو جسم با هم برخورد دارن اگر و فقط اگر که بر روی همه محور ها همپوشانی داشته باشند.

برای هر شکل یک سری محور وجود داره که باید اشکال رو روی تک تک اون محور ها تصویر کنیم اگه تصویر دو شکل روی محوری با هم تداخل نداشت یعنی برخوردی وجود نداره وباید از پردازش بیرون بیاد برناممون.
ادامه مطلب ...
نکاتی در مورد برخورد الاستیک
در برخورد الاستیک طبق قانون پایستگی انرژی ،همواره انرژی ثابته،بنابرین برایند سرعت دو جسم قبل برخورد برابر با مجموع سرعت بعد برخورده،کلا برای شبیه سازی برخورد باید یک سری کارای عمده رو انجام بدیم
1-تشخیص
2-تغییر موقعیت | repositioning|
3-محاسبه سرعت جدید
ادامه مطلب ...
نوسانات و توابع مثلثاتی | OSCILLATION AND TRIGONOMETRIC FUNCTIONS
ادامه مطلب ...
کار-انرژی-توان | WORK-POWER-ENERGY
مفهوم انرژی
غیر از مفهوم نیرو مفهوم دیگه ای که برای حل و پیاده سازی حرکت پرکاربرد هست،مفهوم انرژی و قانون پایستگی انرژی هست،در واقع انرژی ونیروی حرکتی با هم تعامل برقرار میکنن تا ما بتونیم بعضی از مسائل رو باید از این متد استفاده
کرد.collisionآسون تر حل کنیم،برای مثال برای پیاده سازی برخورد
مفهوم کار فیزیکی
ما معمولا میگیم که نیرو عامل حرکته ، و همچنین میبینیم که یک نیرو میتونه وجود داشته باشه که با نیروی دیگری در تعادل باشه،که در این صورت حرکت رخ نمیده،در فیزیک ما وقتی میگیم کار توسط نیرویی انجام شده که باعث ایجاد حرکت در جهت نیرو شده باشه.
اگه Wرو کار،Fرو بزرگی نیرو،و s رو جابجایی و angleرو زاویه بین جهت نیرو و جابجایی در نظر بگیریم داریم:
W=F*s*Cos(angle)
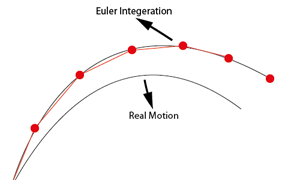
ادغام و انتگرالگیری عددی | NUMERICAL INTEGRATION